发布时间: 2023-10-26
作者:杜昱、赵秀娟 专利代理师
在专利创造性的审查中,一个重要步骤是申请文件的权利要求与对比文件的技术特征比对。《专利审查指南》第二部分第三章第3.2.1节至第3.2.5节规定了新颖性和创造性的审查原则,包括几类技术特征是否相同的对比判断。其中第3.2.1节“相同内容的发明或实用新型”是基本的审查基准,含义为“要求保护的发明或者实用新型与对比文件所公开的技术内容完全相同,或者仅仅是简单的文字变换”,其中“相同的内容应该理解为包括可以从对比文件中直接地、毫无疑义地确定的技术内容”。在技术特征是否相同的判断中,对申请文件和对比文件理解的准确性尤为重要。
在一些情况下,对比文件中公开的技术方案可能较为复杂,公开的技术特征较多,“乍一看”似乎公开了要求保护的权利要求的技术特征。此时要仔细分析对比文件的技术特征之间的联系,理清技术方案的内在逻辑,辨别对比文件中的技术特征与要求保护的权利要求的技术特征的实际含义是否相同。有时,即使对比文件的技术特征与要求保护的权利要求的“关键”技术特征在形式上基本对应,也可将对比文件公开的这些技术特征融合为技术方案整体,提炼出对比文件的发明构思,再与要求保护的权利要求的技术方案整体进行比较,以期寻求答复突破口。
下面将结合两个案例浅谈在创造性审查意见答复中,如何通过分析对比文件找到答复思路。
案例一:发明专利申请A
发明专利申请A(下面简称申请A)的发明构思如下:若垂直于地面方向的不同高度处具有不同的路线,例如地下停车场、高架等,需要对电子导航地图进行切换。本发明利用车载设备的传感器数据(车辆倾斜程度)和POI(兴趣点)信息自动识别地下停车场,利用传感器数据和路网坡度信息自动识别高架,以实现导航地图的自动切换。
申请A的权利要求1的技术特征包括:
“基于车辆的定位信息查找在导航地图上距离车辆预定距离内的第一兴趣点和第二兴趣点;
当车辆的当前俯仰角超过预定倾斜阈值、且查找到第一兴趣点时,确定车辆在第一兴趣点的导航地图;
当查找到第二兴趣点、且车辆的当前俯仰角与第二兴趣点的坡度之差在预定角度范围内时,确定车辆在第二兴趣点的导航地图。”
在第一次审查意见通知书中,审查员认为相对于对比文件1(公开号:CN109917440A)和对比文件2(公开号:CN103323013A)的结合,申请A的全部权利要求不具备《专利法》第22条第3款规定的创造性。
对于该权利要求1,在第一次审查意见通知书中指出,与对比文件1公开的识别出车辆行驶至目标高架的闸道区域时,实时检测的车辆的倾角信息,若车辆的倾角与目标高架的倾角数据匹配,则根据车辆的行驶方向为上行还是下行对应进行地图匹配的技术方案相比,该权利要求1的区别技术特征包括:兴趣点包括第一兴趣点和第二兴趣点,以及确定两种兴趣点采用不同的方法。对此,对比文件2公开了判断车辆倾斜度变化是否超过已设定的邻接角度,如果车辆的倾斜度变化超过临界角度,则从第一和第二候补道路中选择高度之间相距距离小的候补道路实施地图匹配,给出了根据车辆倾斜角与倾斜角度阈值比较以判断车辆所处道路兴趣点的技术启示。
经过分析,专利代理师认为,虽然对比文件2公开的第一候补道路和第二候补道路的技术特征看似对应于该权利要求1的第一兴趣点和第二兴趣点,但其技术方案的实质与该权利要求1相差较大,因此并不能为上述区别技术特征提供技术启示。
对比文件2公开了以下内容:“……假设车辆在第一和第二候补道路上行驶,对应第一和第二候补道路……算出与当前位置对应的第一候补道路的高度(L1z’)和第二候补道路高度(L2z’)……”“三维匹配部150是算出与当前位置对应的车辆高度与候补道路的高度之间的相距距离,确认高度之间的相距距离是否在临界误差以内,从中选择高度之间相距距离在临界误差以内的候补道路实施地图匹配。……”“高度之间相距距离超过临界误差时,三维匹配部150会确认车辆倾斜度的变化是否超过已设定的临界角度,如果车辆的倾斜度变化超过临界角度,则从第一和第二候补道路中选择高度之间相距距离较小的候补道路,实施地图匹配”。
可见,在对比文件2的技术方案中,当第一候补道路的高度和第二候补道路高度与车辆的实际高度比较都超过临界误差时,再确认车辆倾斜度的变化是否超过已设定的临界角度。如果车辆的倾斜度变化超过临界角度,则从第一和第二候补道路中选择高度之间相距距离较小的候补道路,实施地图匹配。而根据对比文件2中假定的第一候补道路为高架道路、第二候补道路为平坦道路,即便确定车辆的倾斜度变化超过临界角度,还是按照第一候补道路的高度和第二候补道路高度与车辆的实际高度之差的大小来确定候补道路,则可能确认车辆的行驶道路为平坦道路的。也就是说,车辆的倾斜度变化与临界角度的关系并不影响对车辆按照第一候补道路还是第二候补道路进行地图匹配的决策,实际影响该决策的只有第一候补道路的高度和第二候补道路高度与车辆的实际高度之差的大小。因此,第一候补道路和第二候补道路实质都不是“通过车辆倾斜程度来确定的兴趣点” ,对比文件2也无法为采用不同的方法确定两种兴趣点提供技术启示。
答复第一次审查意见时,将说明书中关于第一兴趣点和第二兴趣点的含义的描述并入权利要求1,并进一步限定了确定第一兴趣点的方法。经过答复第二次审查意见的形式问题后,申请A获得了授权。
案件小结:有一些对比文件技术特征在形式上和要求保护的权利要求的技术特征具有一定对应性,但在本质上并不是相同的技术方案,而由于对比文件的技术领域和申请文件相同,采用的“核心”技术又比较类似,导致这些技术特征很具有“迷惑性”。这种情况下需要代理人仔细分析对比文件,从技术方案的内在逻辑出发,深入理解对比文件的技术方案,找到对比文件与要求保护的权利要求的不同之处。
案例二:发明专利申请B
发明专利申请B(下面简称申请B)的发明构思如下:如下图1所示,为使无人机降落至预定地点,在以预定地点为中心的正方形的四个角设置了A、B、C、D四根发射天线,无人机设置了1、2、3、4四根接收天线。在无人机降落过程中,接收到信号后锁定一根发射天线的频段,分析该发射天线发射的信号的强度,当根据无人机的实时高度和接收的信号的强度确定无人机接收到的信号强度为在该高度时应接收到的信号强度时,说明无人机已在预定地点正上方或偏转一定角度,此时再锁定至少另一根发射天线的频段,根据接收的至少两根发射天线的信号强度,将无人机导航至在预定地点正上方。
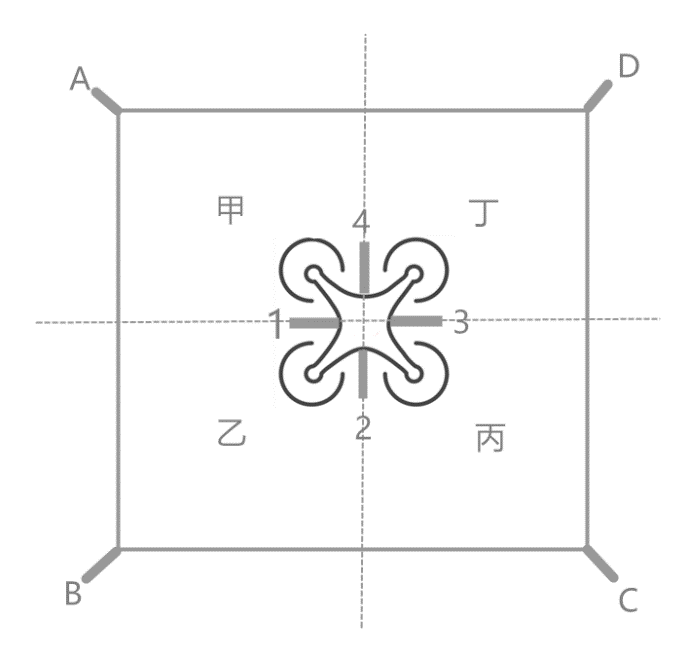
图1
在第一次审查意见通知书中,审查员认为相对于对比文件1(公开号:CN107357310A)和公知常识的结合,申请B的权利要求1、2、5-10不具备《专利法》第22条第3款规定的创造性。
对于申请B的权利要求1,在第一次审查意见通知书中指出,与对比文件1公开的采用均匀地分布在降落区域的的圆周上的多个基准设备向无人机发射信号(如下图2所示),无人机接收多个基准设备的反馈信号,并根据反馈信号确定无人机与各个基准设备之间的距离,进而根据距离调节无人机的飞行方向以达到圆心所在的竖直方向,然后在无人机达到一定高度时,降落到圆周中心的基础上,根据勾股定理以及对比文件1公开的信号强度与无人机与基准设备之间的距离有一定关系,本领域技术人员可以获得根据飞行器的高度和发射天线与预定降落点之间的距离(相当于上图基准设备与圆心之间的距离)的获得信号强度预设值,也容易得到该申请的先控制飞行器到达一定高度(通过信号强度表征),再根据两个发射天线的无线信号调整飞行器在预定降落点正上方的技术方案。
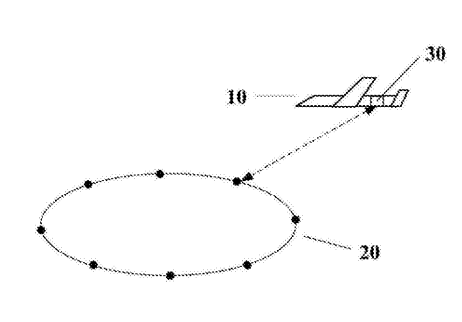
图2
经过分析,专利代理师认为,虽然对比文件1的技术方案的基本原理与申请B相同,都是根据信号的强度等信息确定无人机与降落场地的距离并据此进行降落导航,但其整体技术方案与申请B并不同,因此可基于整体技术方案的区别重新确定该申请解决的技术问题。
对比文件1公开了以下内容:“可以根据需要设置基准设备组件20中基准设备201的数量。在信号不产生干扰以及空间足够的情况下,基准设备201设置的越多,无人机在进行方向调整时所参考的方向就越多,因此定位就越准确”“控制器302可以指示无人机向距离无人机最远的基准设备201所在的方向移动。从而,通过多次移动和调整,无人机会越来越接近基准设备201所在的圆周的圆心所在的竖直方向,即降落点所在的竖直方向”。
可见,以对比文件1的技术方案,需要在调整水平位置过程中,一直接收所有的基准设备的信号,根据信号强度不断地计算各个基准设备与无人机之间的距离,数据处理量较大。而申请B的技术方案中,无人机开始即锁定第一发射天线的信号,根据第一发射天线的信号强度确定无人机在预定降落点上方附近后,再接收(频段不同的)第二发射天线的信号,来调节无人机到达预定降落点正上方,因此本申请的技术方案可以通过频段来控制接收的信号的天线数量,可仅为两个,因此降低了数据处理量。
答复第一次审查意见时,未将限定为四个发射天线的“可授权项”并入权利要求1,仅将说明书中关于多根发射天线发射相同强度但频段不同的信号以及锁定一种频段的信号的相关特征并入,并针对上述区别进行答复。经过答复第二次审查意见的形式问题后,申请B获得了授权。
案件小结:有时对比文件公开的技术方案的基本原理确实与申请文件相同,但并不表示不可能存在其他关键性的区别。此时代理人应梳理对比文件和申请文件的各个步骤后,从整体技术方案的角度重新筛查两者的区别,或许可“绝处逢生”,找到具有实质技术效果的区别点。